硕士毕设-语义分割-2-使用CoT进行Open Vocabulary Label&简单实现类激活图
零: 项目说明
是这样的一个事情,经过与deepseek的一番讨论和交流,DeepSeek为我设计了一个30天高强度学习计划,重点聚焦弱监督/无监督语义分割在野外场景的应用,结合理论与实践,并最终导向可落地的开源项目。
主要想法是做基于大模型的弱监督语义分割,主要步骤如下:
- 自动生成标注:大模型生成
图像级标签,边框,涂鸦、点标注等几种弱监督标注类型的标注: - 生成伪标签:采用基于
类激活图(CAM, Class Activation Mapping)的方法 +CRF后处理,利用分类网络生成伪标签pseudo - 训练分割模型:将伪标签作为监督信号,训练
U-Net、DeepLabv3+等分割网络。
代码在这里:不断改进中:
https://github.com/Tipriest/30Days-for-segmentation
参考引用
https://zhuanlan.zhihu.com/p/29567314
一: 采用思维链Cot优化大模型的image label效果
在上一篇文章中,主要采用了直接通过 CLIP模型+阈值判断的方法和通过 VLM模型:llava两种方法来对地形数据集的图片进行 Image Level标注,如下图所示:
主要发现了如下问题:
CLIP模型对于主体的要求很高,当一个场景具有多个主体的时候,CLIP模型会拉低每一个图片中存在的物体的分类判断阈值。
直接使用llava模型在召回率上甚至不如CLIP,对于很多特殊的地形场景如curd往往没有输出,导致某一些召回率可能很低。
尝试采用思维链的方式进行优化:

比如,对于下面的这张图片

使用如上述所示的思维链的方式进行输出的结果如下所示:
1 | Processing 4/60: ./steps/1_preprocess/key_frames/000202.jpg |
翻译一下,大致是这样的结果:
1 | 处理4/60:./steps/1_preprocess/key_frames/000202.jpg |
目前使用思维链的方式确实有了一定召回率上的提示,相比于原来的直接用VLM输出结果,但是结果还不够好,这个后续再继续优化….
二: 关于类激活图
Michael Yuan佬在自己的知乎上发表过一个非常易懂的关于类激活图的科普文章,这里借用一下佬的两张动图来直观说明一下:
CAM 指的是经过加权的特征图集重叠而成的一个特征图。它可以显示模型做出分类决策的依据主要来自于特征图集中的哪些特征图。(可以结合下面这张Michael Yuan佬画的图来理解)
由于采用迁移学习策略,因而整个模型在训练时,会发生变化的参数只有分类器的权重矩阵 ,因此对于同一张图片,卷积层输出的特征图集始终不变,但分类概率会随着权重矩阵的变化而不断改变。这也就是模型学习的过程,即:到底哪些特征图对于提高分类准确率最有帮助?
可以看到,模型做出分类决策的依据来源于权重矩阵。那么如何进行可视化呢?
矩阵本身只是一堆大小不一的权值而已,并不直观。不过我们可以注意到,权重矩阵对图像的理解基于对特征向量的加权,而特征向量背后是一个个特征图,因此可以跳过特征向量,直接将这些特征图用权重矩阵加权,再重叠合成为一张特征图,就可以很直观的看到到底模型是通过看哪片区域来做出判断的。
我在我的野外环境的数据集上,根据图像级标注生成的类激活图的效果,可以看到类激活图关注的主要是一个点而非全部,类似的类激活图也比较难用在我的语义分割伪标签生成任务中,后面的 CRF过程会很麻烦。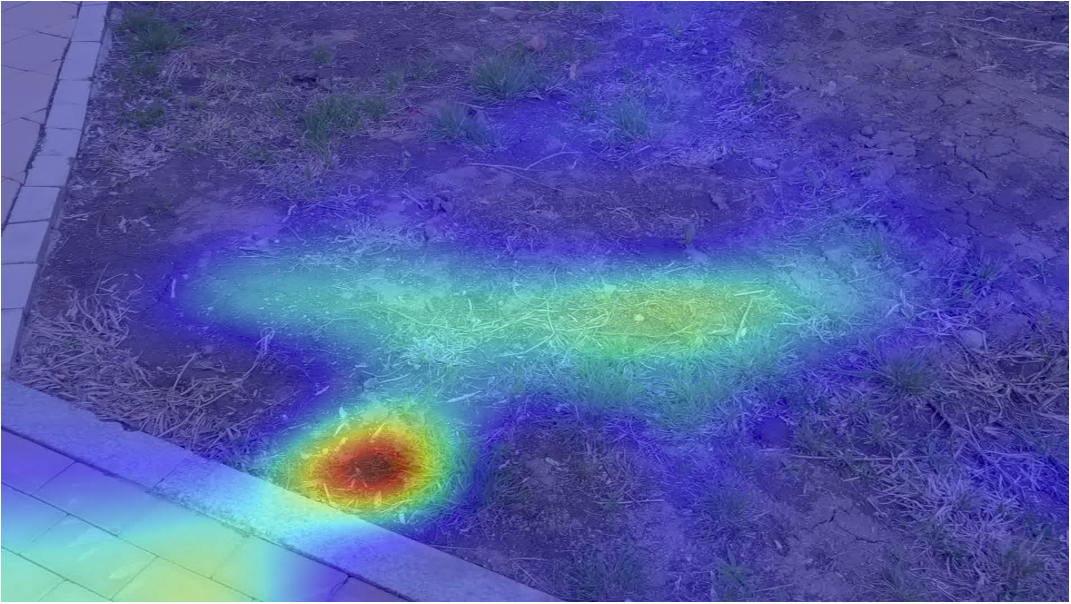

目前我的类激活图的效果还并不好,理想的状态应该是如下的:
| 类别 | 激活图示意图(文字描述) | 合理性判断标准 |
|---|---|---|
| 马路 | 左侧大面积均匀暖色区域,渐冷至右侧边缘 | 覆盖真实马路区域,无侵入其他类别 |
| 车道线 | 中间细长亮黄色线条,周围马路区域为冷色 | 线状激活宽度与实际车道线匹配 |
| 马路牙子 | 右侧边缘窄条状高激活,分隔马路与红砖地 | 严格沿垂直方向分布,无横向扩散 |
| 红砖地 | 右侧斑块状/网格状激活,与马路牙子激活相邻 | 纹理匹配,不污染左侧马路区域 |
因为类激活图做的人还是很多的,所以一些可能的改进方案如下:
分辨率限制:传统CAM基于最后一个卷积层,可能导致激活图粗糙(如车道线变粗)。可尝试:
- Grad-CAM++:增强细粒度结构的激活灵敏度
- HiResCAM:保留更高空间分辨率
多类别混淆:若多个类别同时高激活(如红砖地与马路牙子重叠),可能需要:
- 逐类别生成CAM(每个类别单独可视化)
- 结合注意力机制可视化(如Transformer-based模型的Attention Rollout)
语义分割专用CAM:对于分割模型(如DeepLab、UNet),建议:
- 使用SegCAM或Pixel-wise CAM直接关联像素级预测
- 可视化中间层特征图(观察低级边缘/纹理特征)
